
The Inspiration
Although the tabletop was running, the problem now was how to house the additional electronics we decided to add in. As I was furiously looking for things to do other than studying for my circuits midterm, I found this table at the Rock (or the Rockefeller Library for the non-Brown readers):





Yes, the picture quality is subpar but that shows the eureka moment that went through me then. That table gave me multiple ideas;
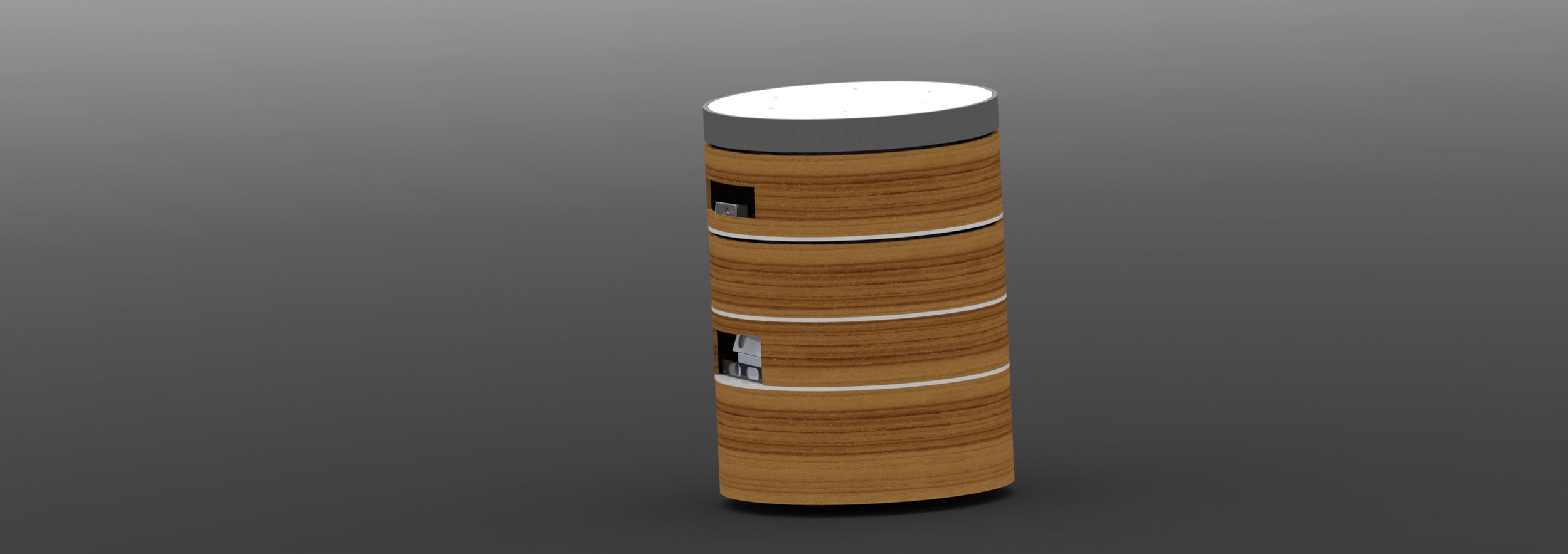
- the lines on the outside of the table could serve as a design element that would differentiate the different plates or sections of the robot
- the inevitable disconnects of a singular wooden cylinder design for the accessible hatches for the bottom could be made as if it is an intended design choice
- the tabletop could also be an individually rotatable input device
This really got a lot of ideas running in my head, and I was excited; take a look at an except from an email thread where I was clearly excited:
Also, this is just an idea (an exciting one that I would love to talk about on Friday) but what if we make the top of the table into a hand-rotatable strata, without a motor, to use it as an input device for the TableBot? For example, we can push the table on the side, then rotate the tabletop as a handle to direct its direction (just as if you would do if you wanted to move a real physical table!), or use it as a knob to select something from a menu—I think a natural, discreet method to interact and control the TableBot is another aspect of research that we need to focus on, since a joystick is not a good way to control a table.
finding its way into tablebot
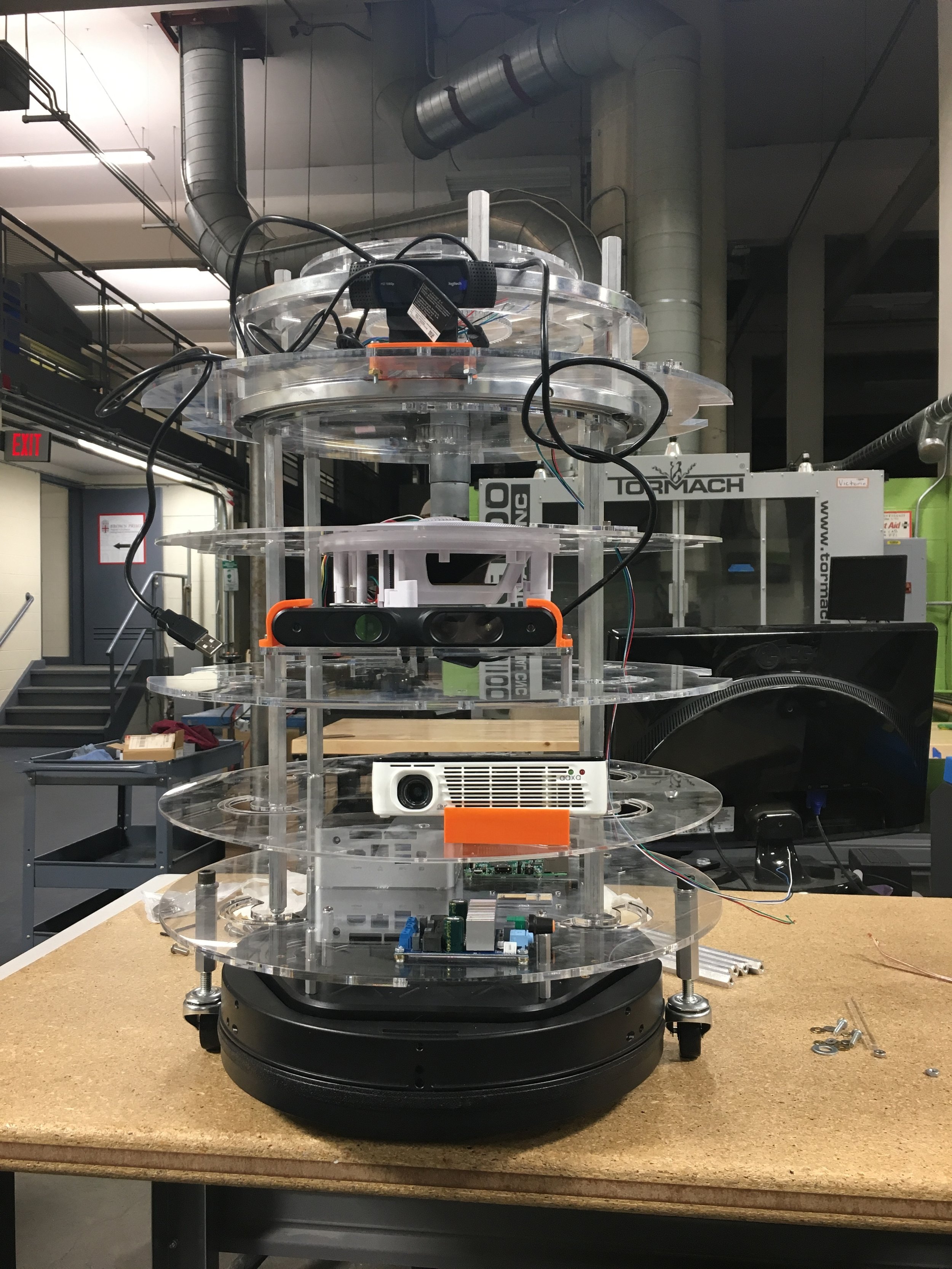
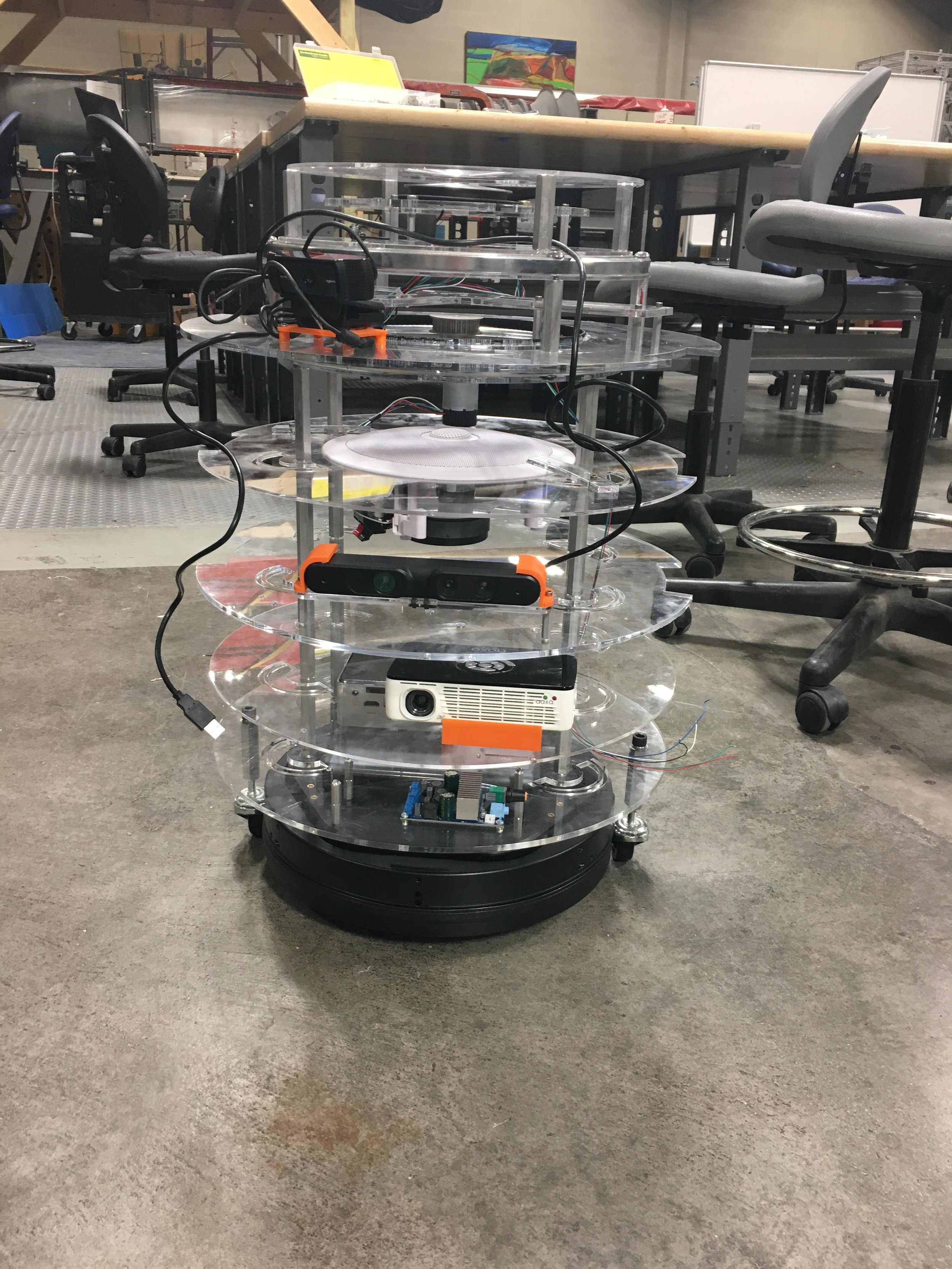
The interpretation of the lines on the edges of the table above would become a strata-based design where each level on the tablebot, or strata, would hold a specific purpose, as well as move independently of each other. The initial design was made up of 6 strata;
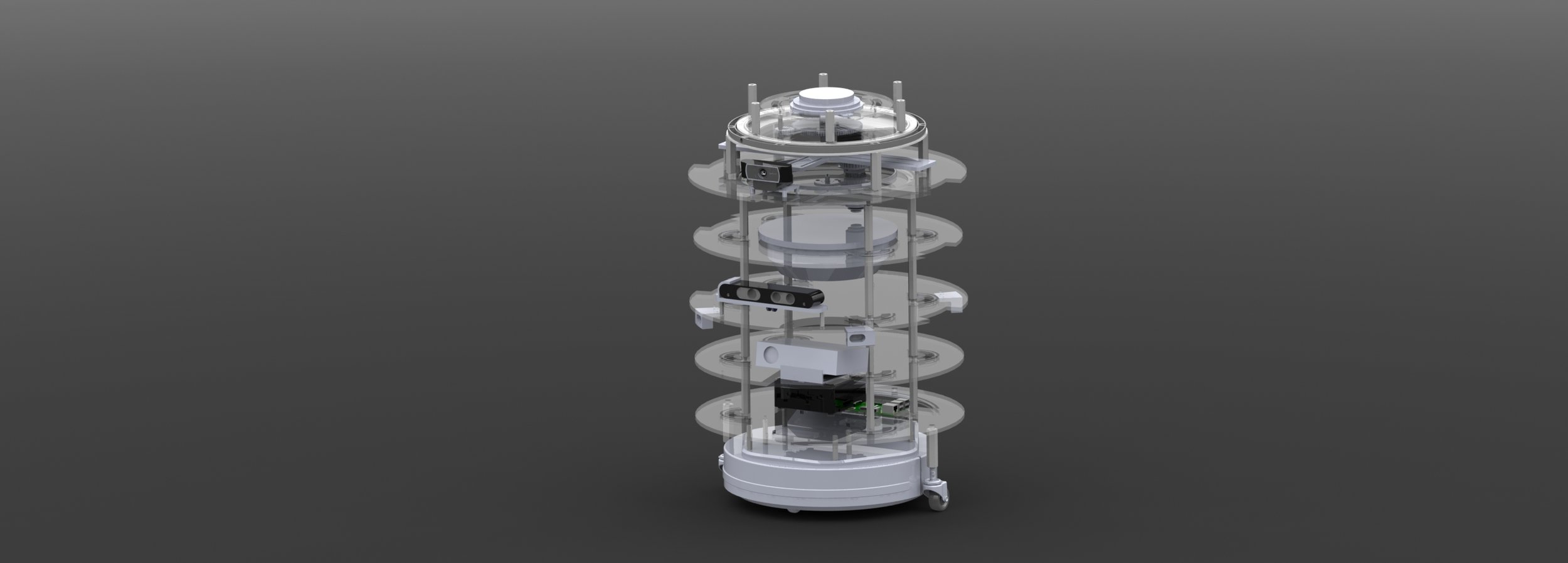

- Tabletop Strata
- Camera Strata
- Speaker Strata
- Vision Strata
- Projection Strata
- Electronics Strata
- TurtleBot 2 Base
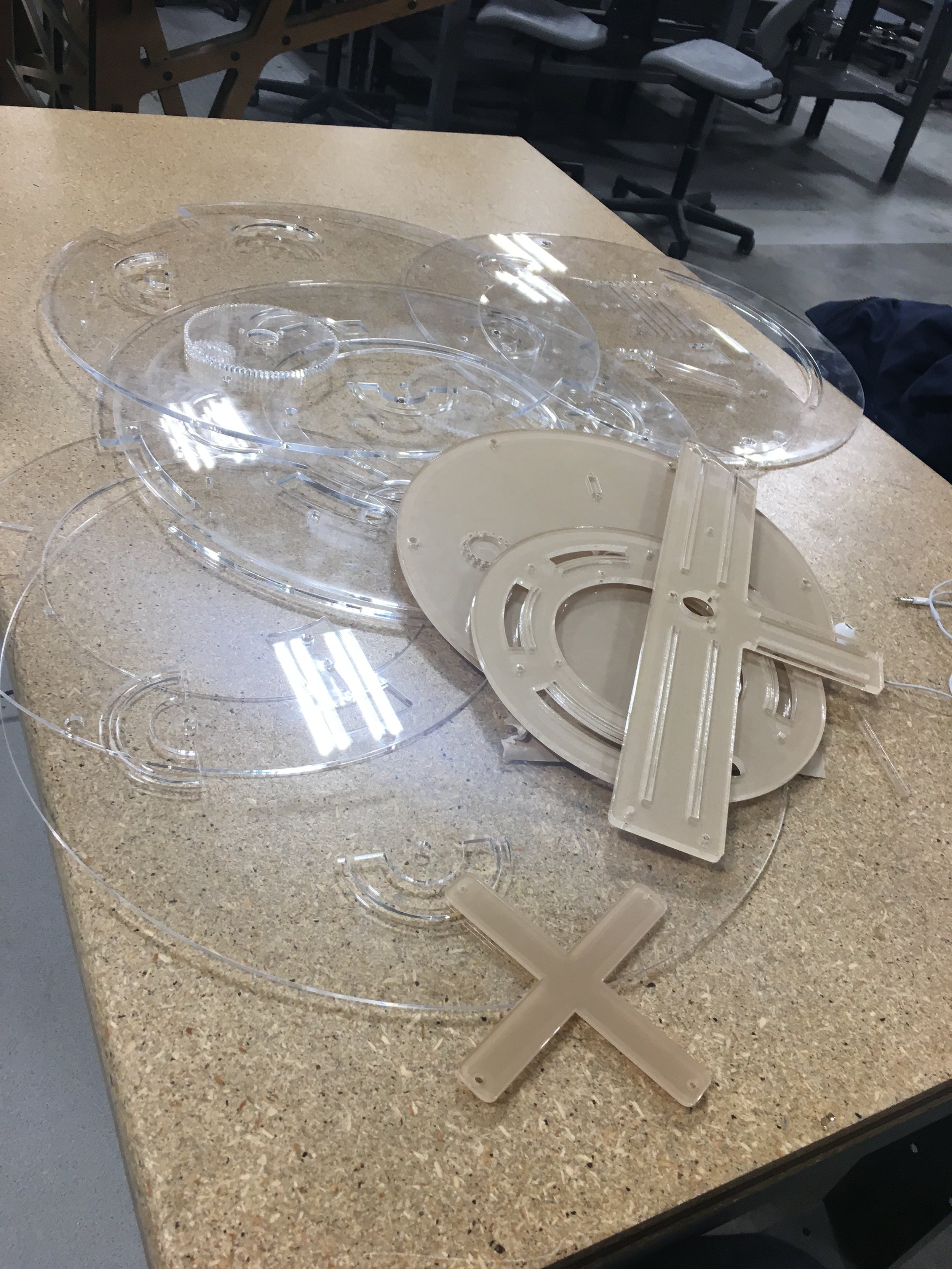
making the strata based tablebot
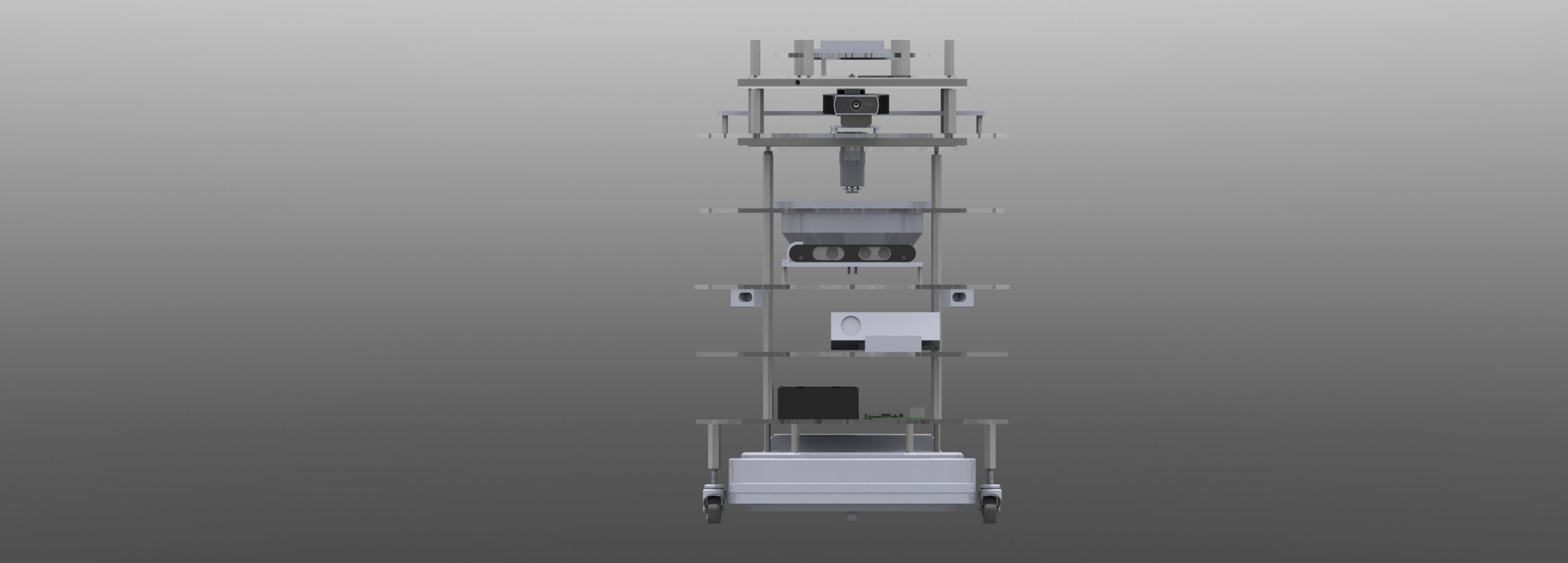
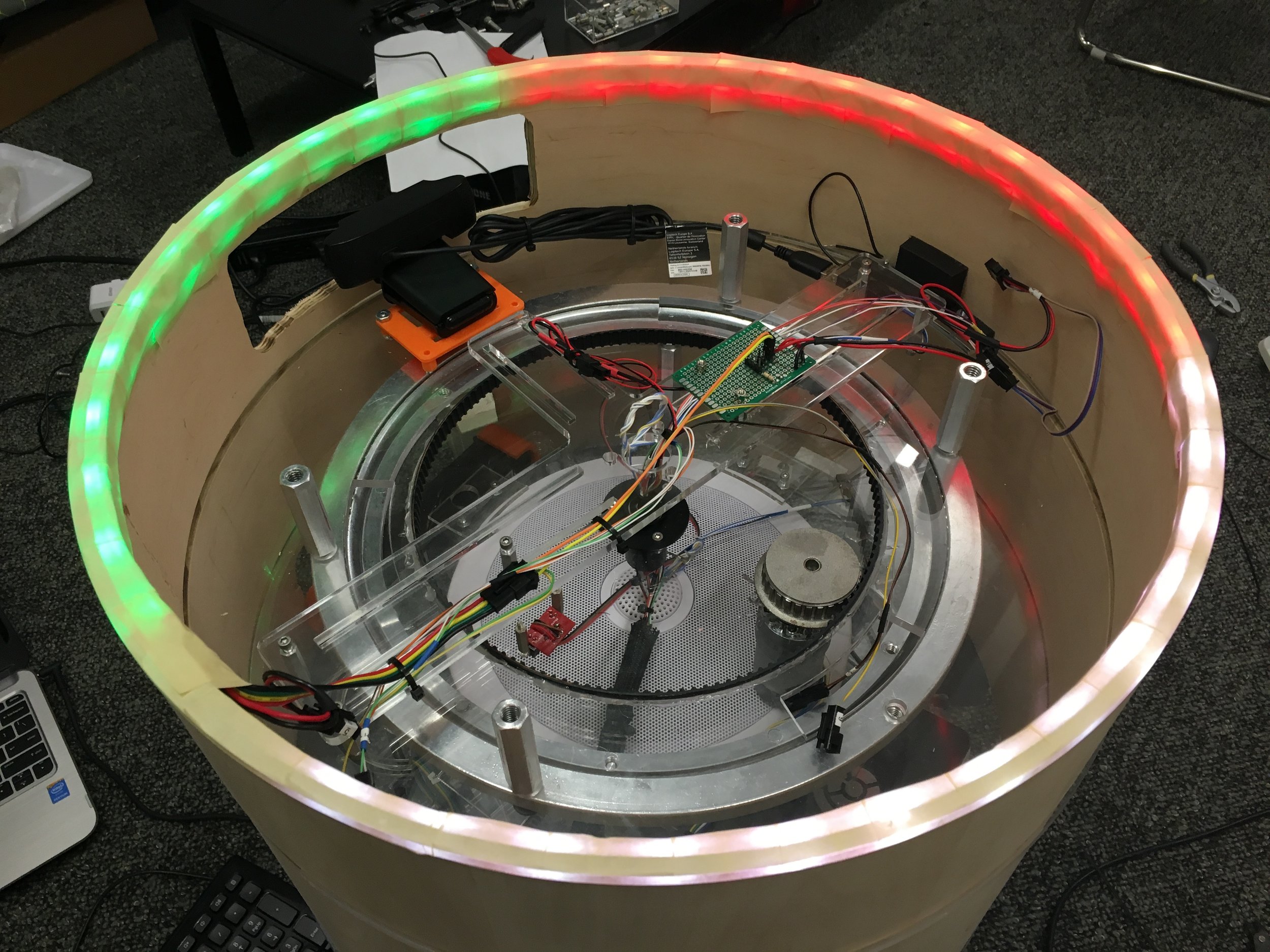
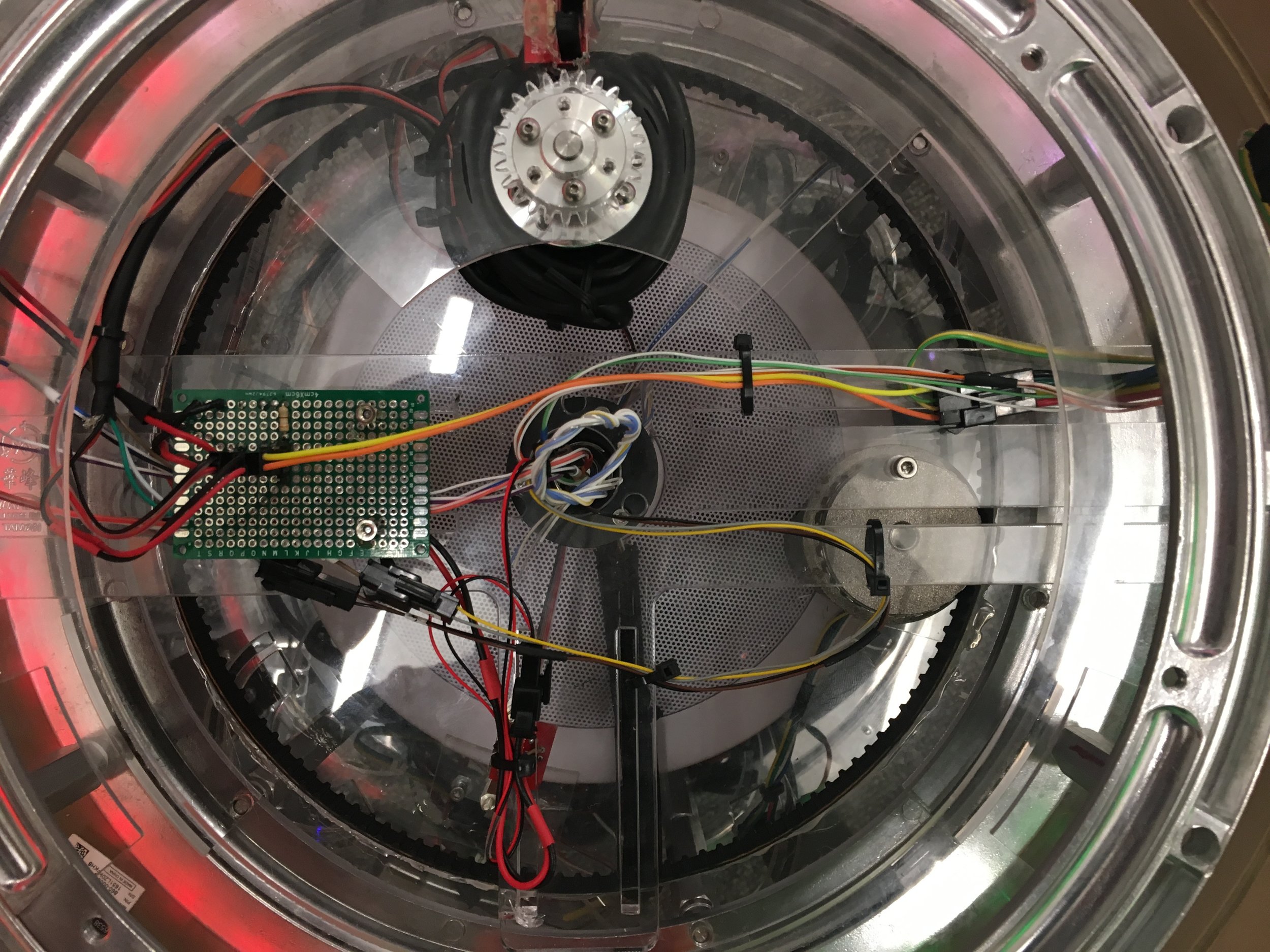
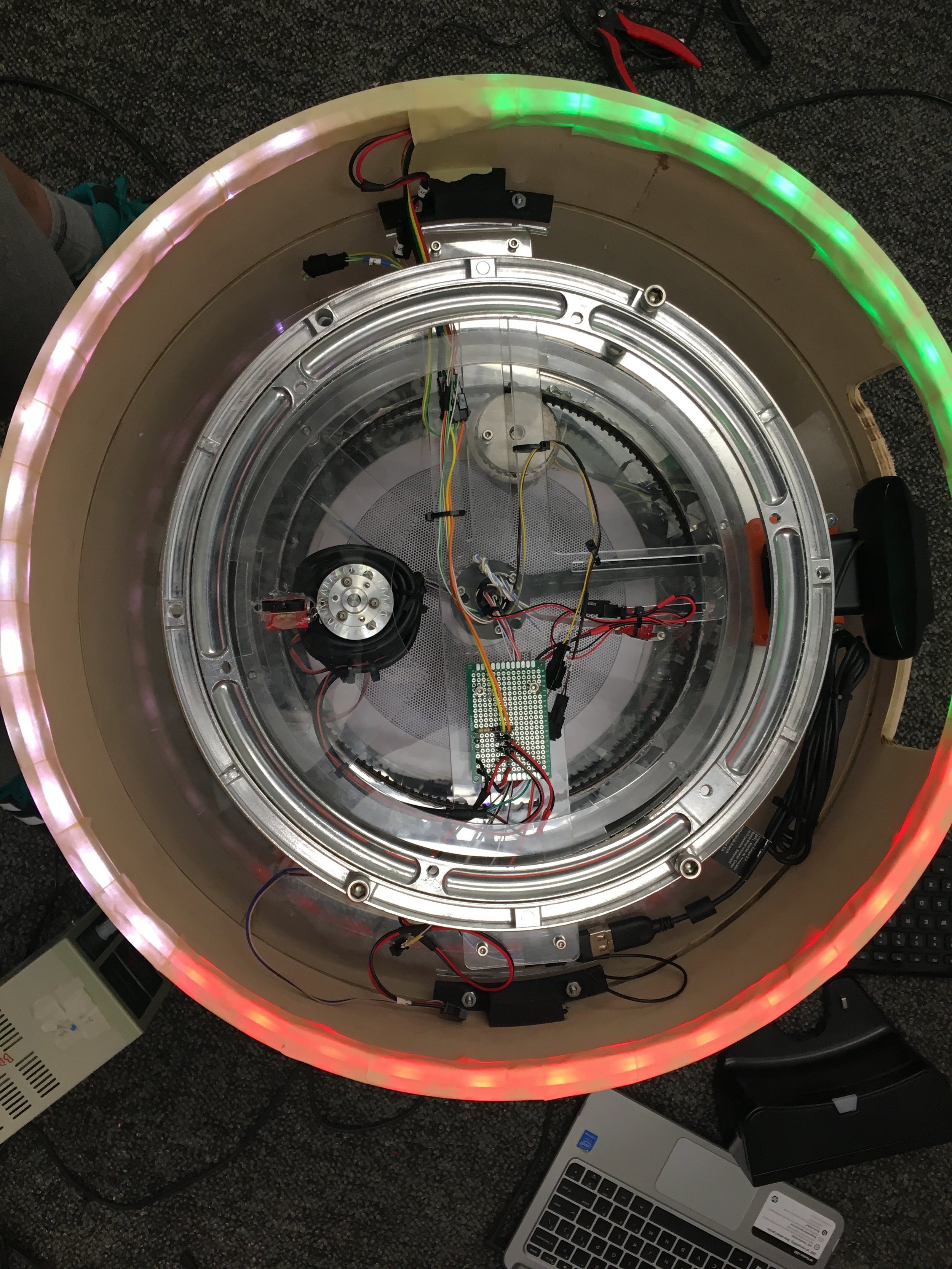
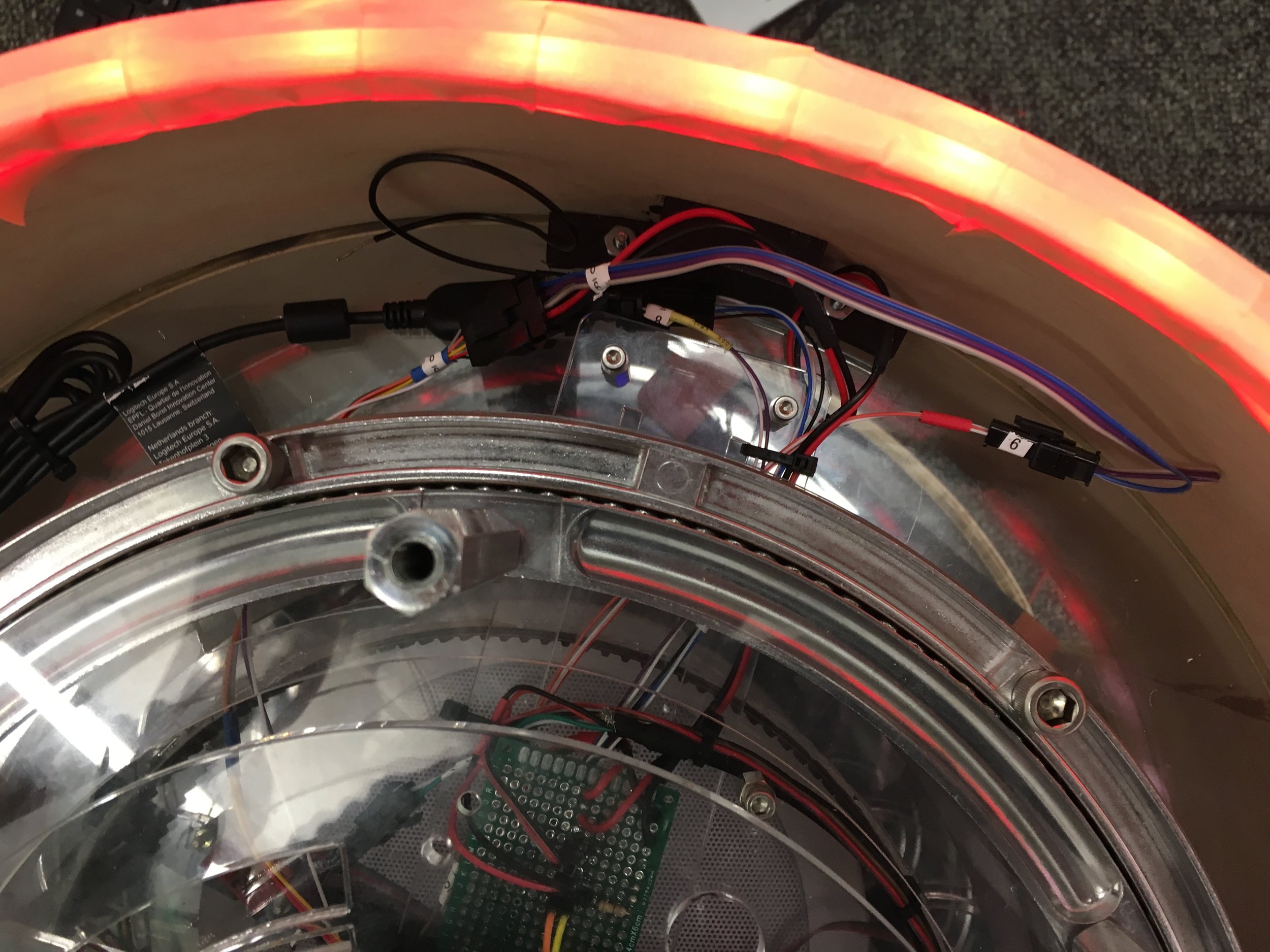
Below are the pictures of making the strata based TableBot.






To make the Tabletop and the Camera strata rotate independently from each other, as well as avoiding wiring hassles, two slip rings were used. I crimped on JST-SM plugs on the ends of the slip ring, and made JST-SM connections to sensors, webcam, microphones and other electronics placed on one of the two rotating strata. Below are some internal pictures for wiring:
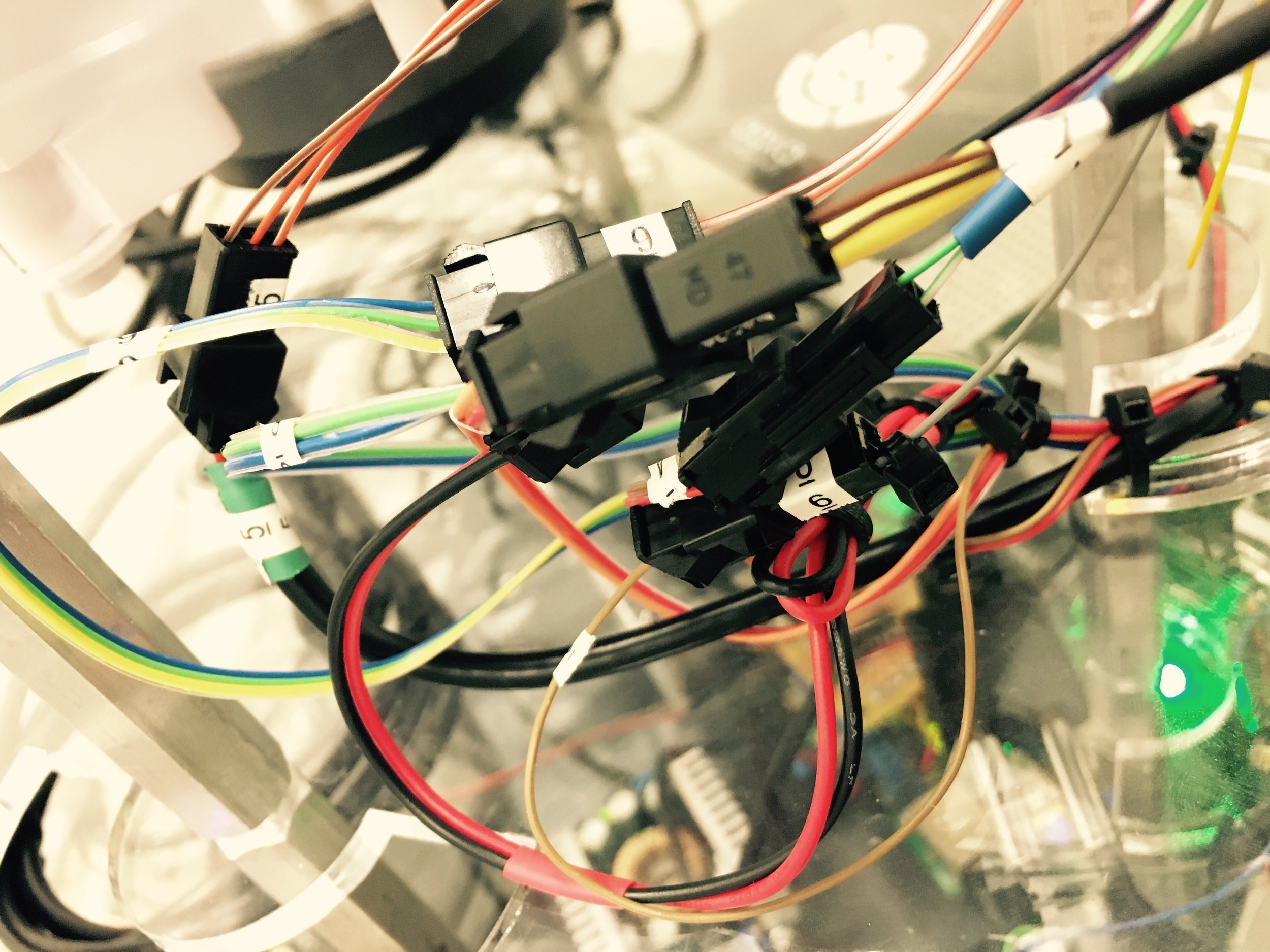
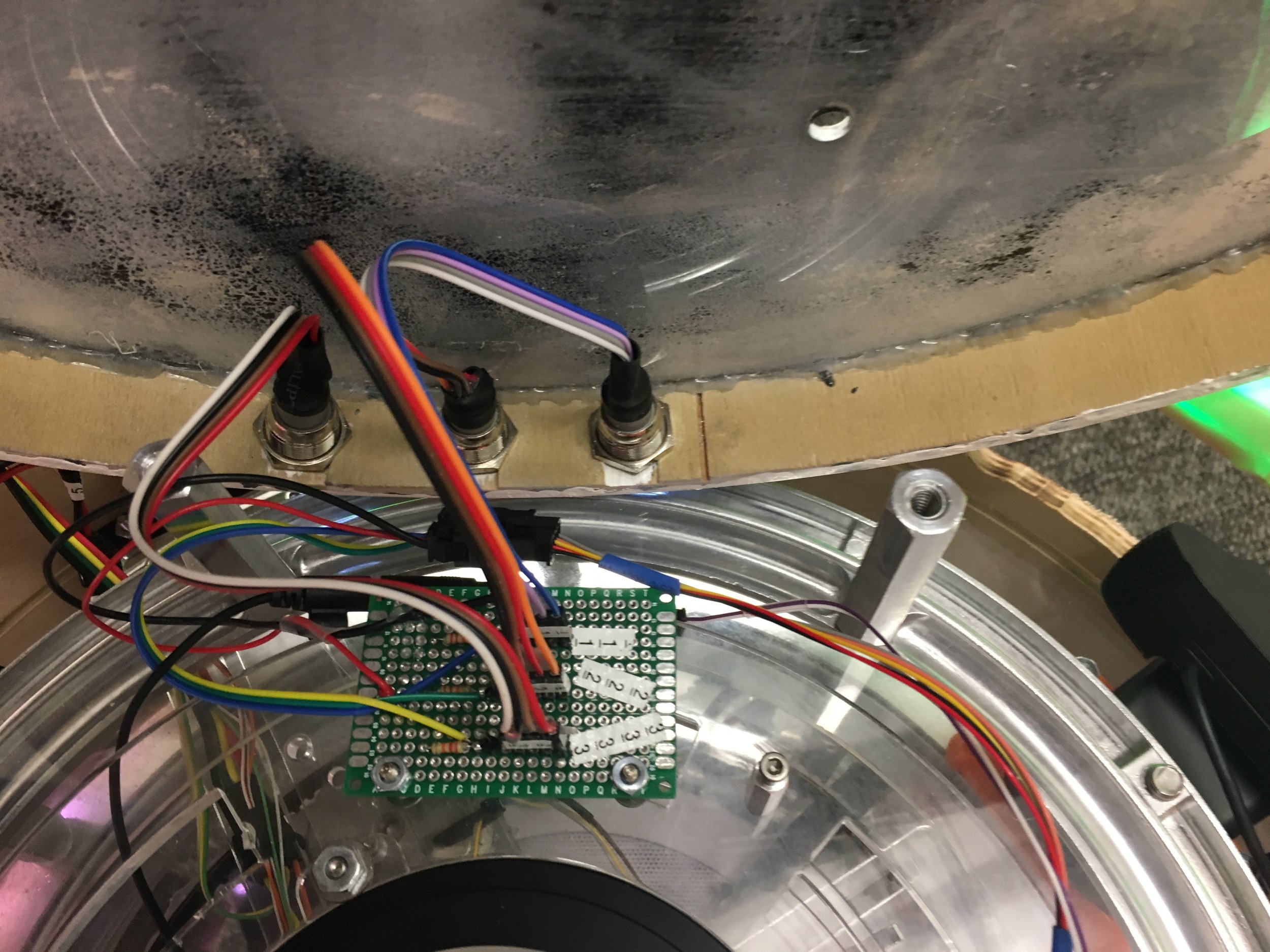
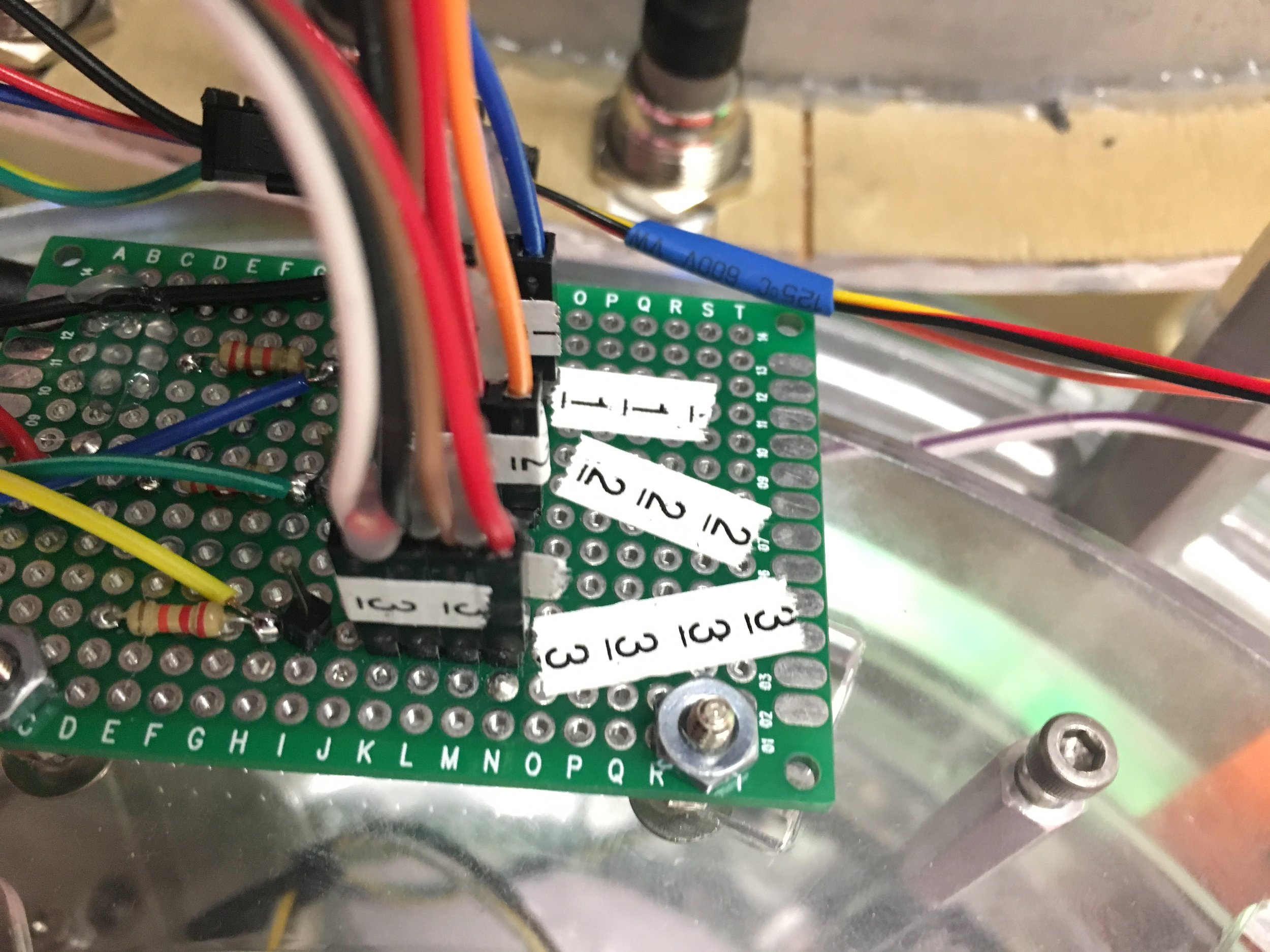
but the design process becomes much more interesting once we take into account how to attach the outer shells; a more detailed explanation of how the outer shells work will be explained in the next post!